Why 10Hz Is Better Than 20Hz for Accurate Tracking: Understanding GNSS Sample Rates
When it comes to motion tracking, it might seem intuitive to think that more is better. A higher sample rate, like 20Hz (20 data points per second), sounds like it should deliver smoother and more accurate tracking compared to 10Hz.
But in real-world GNSS applications, a higher sample rate does not always lead to better accuracy. In fact, 10Hz often provides the best balance between precision, stability, and reliability.
Let’s dive into why this is the case.
GNSS Errors: Why Positions Are Not Perfect
Each GNSS position estimate is influenced by several unavoidable sources of uncertainty, including atmospheric delays, satellite clock errors, signal reflections (known as multipath), and random receiver noise.
Even when standing perfectly still, your GNSS position will "wobble" slightly due to these effects. This background noise is critical to understand when deciding on an optimal sample rate.
Trade-Offs Of Higher Sample Rates
Higher sample rates increase the number of data points, but they come with significant drawbacks that reduce overall data quality:
- Limited signal processing time: Less time between updates means the receiver has fewer opportunities to apply filtering and error correction techniques.
- Reduced satellite diversity: Modern GNSS receivers can receive signals from GPS, Galileo, GLONASS, and BeiDou satellites simultaneously. However, at higher sampling frequencies, depending on the device’s internal processing limitations, the receiver may not fully utilize all available satellite constellations, significantly reducing accuracy.
In simple terms: at very high sample rates, you are just recording more noise, not more real motion.
Improving Data in Lower Sample Rates
To maintain tracking precision without increasing noise at higher GNSS sample rates, we apply two main strategies:
- Interpolation Between GNSS Fixes: Rather than capturing noisy and highly correlated position updates at 20Hz, we collect cleaner, more accurate positions every 100 milliseconds at 10Hz. When higher time resolution is needed, we use interpolation techniques to estimate motion between these reliable GNSS fixes. This provides a smooth and realistic trajectory without introducing artificial noise or overwhelming the system with redundant measurements.
- Sensor Fusion with High-Frequency IMU Data: For applications requiring extremely precise timing, such as detecting the exact start of a rowing race or capturing rapid directional changes, we complement GNSS data with readings from our onboard inertial measurement unit (IMU), which can sample at rates up to 2000Hz. This high-frequency motion data ensures that rapid events are captured with extreme detail, allowing for fine-grained motion analysis without compromising the stability of the overall tracking path.
It'simportant to remember that techniques like interpolation and sensor fusion can make motion tracking more detailed, but they only work well if the GNSS data is stable and accurate. By combining these methods carefully, we deliver motion tracking that is realistic, reliable,and works well in real-world situations.
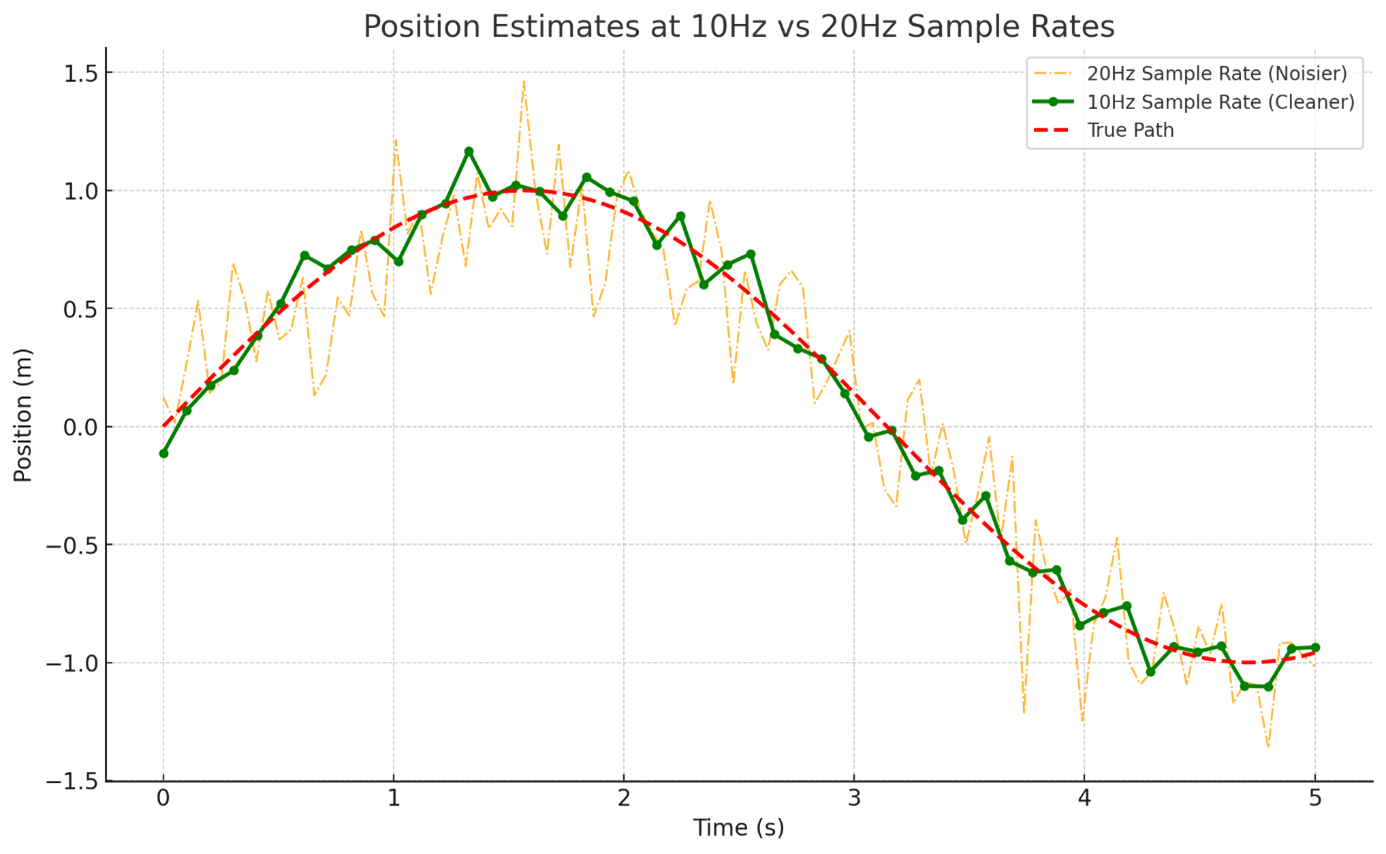
Real-WorldExample: 10Hz vs 20Hz Tracking
The following graph illustrates how position estimates differ when sampling at 10Hz and 20Hz:
Conclusion: Why We Chose 10Hz for Our Motion Tracker
After extensive real-world testing, we found that using a 10Hz GNSS sample rate provides the best combination of clean, accurate positioning and efficient use of system resources.
With 10Hz GNSS data providing a stable backbone and our high-rate IMU capturing fine details of rapid movement, users can trust their motion tracking results across a wide range of sports and dynamic activities.
Higher sample rates may sound impressive on paper, but when it comes to achieving real-world accuracy, stability, and trustworthy motion data, 10Hz is simply the better choice.
